PLC控制伺服電機的三大方式
一、轉(zhuǎn)矩控制
二、位置控制
三、速度模式
1、轉(zhuǎn)矩控制
轉(zhuǎn)矩控制方式是通過外部模擬量的輸入或直接的地址的賦值來設(shè)定電機軸對外的輸出轉(zhuǎn)矩的大小,具體表現(xiàn)為例如10V對應(yīng)5nm的話,當(dāng)外部模擬量設(shè)定為5V時電機軸輸出為2.5Nm:如果電機軸負載低于2.5Nm時電機正轉(zhuǎn),外部負載等于2.5Nm時電機不轉(zhuǎn),大于2.5Nm時電機反轉(zhuǎn)(通常在有重力負載情況下產(chǎn)生)。
可以通過即時的改變模擬量的設(shè)定來改變設(shè)定的力矩大小,也可通過通訊方式改變對應(yīng)的地址的數(shù)值來實現(xiàn)。
2、位置控制
位置控制模式一般是通過外部輸入的脈沖的頻率來確定轉(zhuǎn)動速度的大小,通過脈沖的個數(shù)來確定轉(zhuǎn)動的角度,也有些伺服可以通過通訊方式直接對速度和位移進行賦值。
由于位置模式可以對速度和位置都有很嚴格的控制,所以一般應(yīng)用于定位裝置。
3、速度模式
通過模擬量的輸入或脈沖的頻率都可以進行轉(zhuǎn)動速度的控制,在有上位控制裝置的外環(huán)PID控制時速度模式也可以進行定位,但必須把電機的位置信號或直接負載的位置信號給上位反饋以做運算用。
以SINAMICS V90系統(tǒng)為例說明。
SINAMICS V90 根據(jù)不同的應(yīng)用分為兩個版本:
1. 脈沖序列版本(集成了脈沖,模擬量,USS/MODBUS);
2. profinet通訊版本。
SINAMICS V90 脈沖版本可以實現(xiàn)內(nèi)部定位塊功能,同時具有脈沖位置控制,速度控制,力矩控制模式。
下圖所示為脈沖串指令速度控制模式(Pti)下的默認接口定義,符合標(biāo)準(zhǔn)的應(yīng)用習(xí)慣。
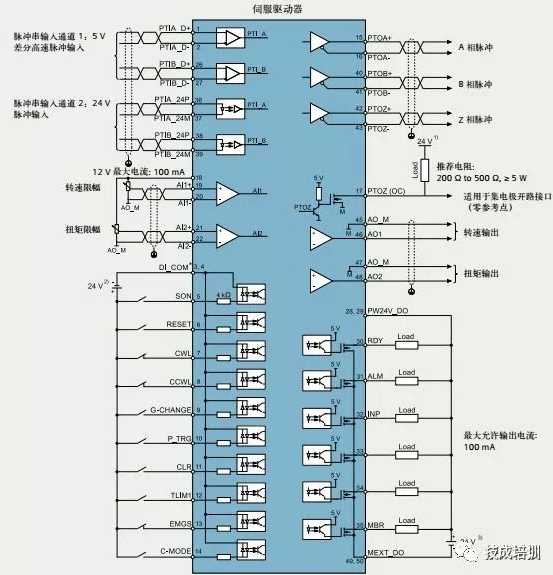
同時只允許使用一個脈沖輸入通道,其他控制信號也可以自由分配到數(shù)字量輸入和輸出端子上,請參見操作手冊。
數(shù)字量輸入,支持NPN和PNP兩種類型。接線圖中的24V電源如下:
(1)用于SINAMICS V90的24V電源。所有的PTO信號都必須連接至使用同一24V電源的控制器,如SINAMICS V90。
(2)隔離的數(shù)字量輸入電源,可使用控制器電源。
(3)隔離的數(shù)字量輸出電源,可使用控制器電源。
SINAMICS V90 伺服驅(qū)動:

電機抱閘信號(僅用于 SINAMICS V90 200 V 驅(qū)動)。SINAMICS V90 200 V 驅(qū)動需要使用外部繼電器來連接電機抱閘。
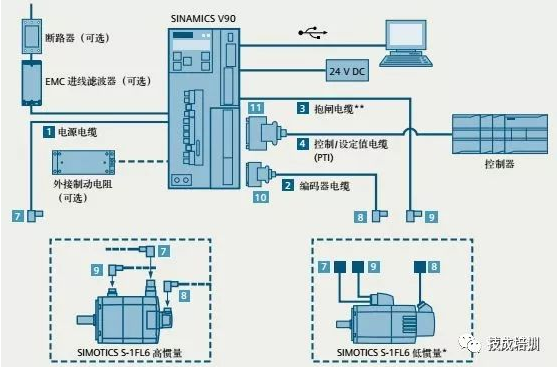
SINAMICS V90 脈沖序列版本的系統(tǒng)接線圖:
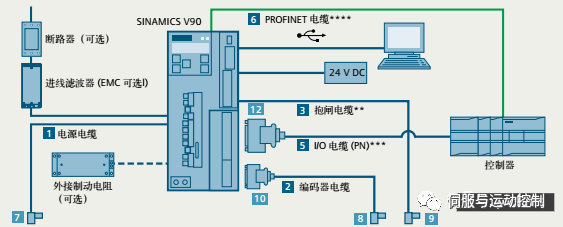
SINAMICS V90 PROFINET 版本的系統(tǒng)接線圖:

1、SIMOTICS S-1FL6 低慣量電機 SH20、SH30 及SH40 使用電纜型連接器。
2、此處所展示的抱閘電纜連接僅適用于 V90 400 V 驅(qū)動。V90 200 V 驅(qū)動需要使用外部繼電器來連接電機抱閘電纜。
3、SINAMICS V90 PTI 驅(qū)動必須通過設(shè)定值電纜連接繼電器,而 SINAMICS V90 PROFINET 驅(qū)動通過 I/O 電纜連接繼電器。
4、必須使用 I/O 電纜來實現(xiàn) SINAMICS V90 PROFINET 200 V 驅(qū)動的抱閘控制,并實現(xiàn)除 PROFINET 通訊之外需要額外 DI/DO 的應(yīng)用。
相關(guān)產(chǎn)品

發(fā)那科那些常發(fā)生故障的設(shè)備和常遇到的錯誤代碼 2023-09-12
Kawasaki川崎機器人錯誤代碼分類列表與排錯技巧 2023-09-05